優れた海中車両には小さなパッケージが付属
-109905 "Riptide AUV(クレジットBAEシステム)")
Riptide AUV(クレジットBAEシステム)
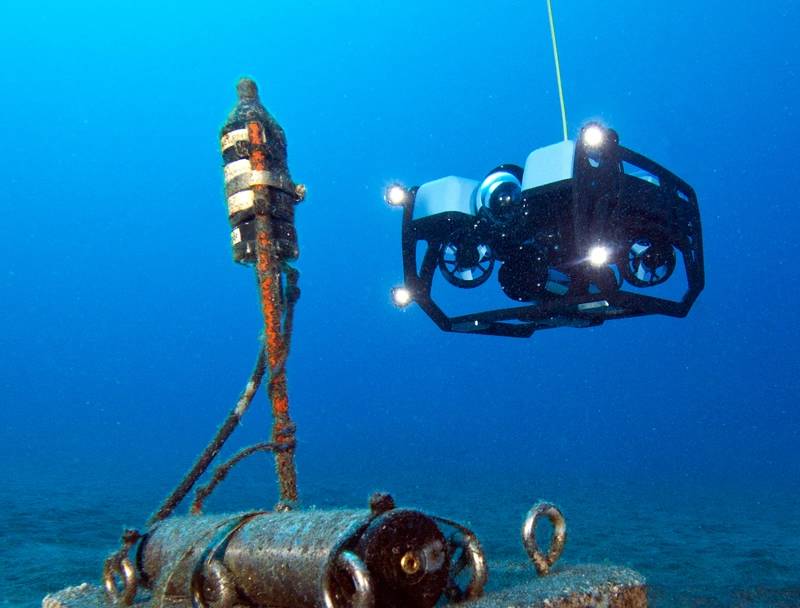
-109906 "トライデントROV(クレジットSOFARオーシャン)")
トライデントROV(クレジットSOFARオーシャン)
-109907 "サンゴ礁上のレンジャーボット(クレジットマシューダンバビン/ QUT)")
サンゴ礁上のレンジャーボット(クレジットマシューダンバビン/ QUT)
ホリデーシーズンが過ぎたばかりで、多くの人が「良いものは小さなパッケージで届く」というフレーズを聞いたことがあります。これは、今日の海底車両にも当てはまりますか?確かにそうです。この分野で最も顕著な最近の傾向の1つは、コンパクトで手頃な価格でありながら非常に効果的な海中車両の普及です。過去10年間、新しい遠隔操作車両(ROV)と自律水中ロボット(AUV)が生産されており、1人で簡単に持ち運んで配備できます。家電分野に触発された回路、センサー、およびバッテリーの開発を活用して、これらの小型車は実際の用途で重量クラスを上回っています。
検討できるROVとAUVの例は数多くありますが、4つの選択はカテゴリの例として検討する価値があります。また、いくつかの重要な技術的および運用上の選択に関する対照的な視点も提供します。 ROVの場合、Sofar Ocean Tridentはおそらくコンパクトなパフォーマンスと設計の最適化の頂点を表します。 BlueROVという適切な名前のBlue Roboticsは、より柔軟なオプションを提供します。 AUVでは、高度に設計された「クラシック」アプローチが、非常に柔軟なソフトウェアの見通しを備えていますが、BAE SystemsのRiptideマイクロビークルによって実証されています。クイーンズランド工科大学からの新規参入者であるRangerBotは、特定のユースケースのコストを抑えるための新しいパラダイム変更を提示します。
ROVから始めて、Blue RoboticsのBlueROVは典型的なROVフォームファクターを提供します。より大きな作業または研究ROVと同じように設計されたこの車両には、電子機器とバッテリーエンクロージャ、スラスタ、浮力フォーム、バラスト重量を搭載するオープンフレームがあります。このシンプルなデザインは、堅牢で拡張可能であり、フィールドに完全に精通しています。このシステムは、6スラスターと8スラスターの構成、多くのオプションアクセサリ、および優れたパフォーマンスと柔軟性を提供します。しかし、コスト削減と複雑さの管理に対する斬新なアプローチにより、これはゲームチェンジャーになります。
コストを抑えるため、BlueROVは部分的に組み立てられた状態で出荷されます。完了するには、推定6〜12時間のユーザーアセンブリが必要です。これは購入者にとってはコスト削減になりますが、顧客にコンポーネントやシステムアーキテクチャを理解する機会を提供します。これは、エンドユーザーの変更とアップグレードを目的としたツールをサポートします。この車両は一般的なドローンテクノロジーを活用し、オープンソースのArduSub制御ファームウェアを採用しています。これにより、便利な機能と広範なユーザーコミュニティの両方が提供されます。オペレーターは、ラップトップコンピューターとゲームコントローラーでROVを制御します。オープンソースのQGroundControlアプリケーションは、ユーザーインターフェイスを提供します。この強力なテクノロジーの組み合わせは、3,500ドルという非常に低いエントリー価格で提供されます。これにより、真に有能なROVが重要な新規視聴者にもたらされます。
 BlueROV(Credit Blue Robotics、Jeff Milisen)また、ROVの視聴者を拡大しているのは、以前はOpenROVだったSofar OceanのTridentです。このコンパクトなROVは、エンジニアリング最適化のケーススタディです。そのフォームファクタとアーキテクチャは、他のバッテリ駆動ROVからの大幅な進化です。トライデントは、ROV(遠隔操作車両)の汎用性と制御、およびAUV(自律型水中車両)の効率性を組み合わせたユニークなデザインです。狭いスペースで拡張線形トランセクトおよび複雑な操作を実行できます。ユニークなオフセット構成で3つのスラスタのみを使用して、ROVは効率的に前進できますが、非常に繊細に操縦できます。 ROVの中心から外れた垂直スラスタにより、高速でピッチングするだけでなく、低速で動作しながらピッチングせずにホバリングまたは深度を変更できます。これは、従来のROVの動作と同様です。移植性が高く耐久性が高い。 ROVはバックパックに収まるほど小さく、サイドパネルはゴムコーティングで成形され、バンパーの形をしています。ユーザーインターフェイスはHTML5やWebGLなどのインターネット標準に基づいており、ラップトップ、タブレット、およびモバイルデバイスで実行されるブラウザーのみでパイロット操作を行うことができます。最新のソフトウェアオープンソースアプローチを採用することで、コミュニティと会社の両方がコードベースを継続的に更新できるようになります。これにより、新しいユーザーインターフェイスなどのユーザードリブンソフトウェアの変更により、操作エクスペリエンスが改善され、ROID機能が改善されてグローバルトライデントコミュニティに提供されます。
BlueROV(Credit Blue Robotics、Jeff Milisen)また、ROVの視聴者を拡大しているのは、以前はOpenROVだったSofar OceanのTridentです。このコンパクトなROVは、エンジニアリング最適化のケーススタディです。そのフォームファクタとアーキテクチャは、他のバッテリ駆動ROVからの大幅な進化です。トライデントは、ROV(遠隔操作車両)の汎用性と制御、およびAUV(自律型水中車両)の効率性を組み合わせたユニークなデザインです。狭いスペースで拡張線形トランセクトおよび複雑な操作を実行できます。ユニークなオフセット構成で3つのスラスタのみを使用して、ROVは効率的に前進できますが、非常に繊細に操縦できます。 ROVの中心から外れた垂直スラスタにより、高速でピッチングするだけでなく、低速で動作しながらピッチングせずにホバリングまたは深度を変更できます。これは、従来のROVの動作と同様です。移植性が高く耐久性が高い。 ROVはバックパックに収まるほど小さく、サイドパネルはゴムコーティングで成形され、バンパーの形をしています。ユーザーインターフェイスはHTML5やWebGLなどのインターネット標準に基づいており、ラップトップ、タブレット、およびモバイルデバイスで実行されるブラウザーのみでパイロット操作を行うことができます。最新のソフトウェアオープンソースアプローチを採用することで、コミュニティと会社の両方がコードベースを継続的に更新できるようになります。これにより、新しいユーザーインターフェイスなどのユーザードリブンソフトウェアの変更により、操作エクスペリエンスが改善され、ROID機能が改善されてグローバルトライデントコミュニティに提供されます。
この使いやすい高性能パッケージは、Amazonで1,700ドルで販売されています。これは、アクセス可能で有用な海洋ロボットの真の新しい時代です。テザーエクスペリエンスをお探しの場合は、高度に最適化されたシステムを選択するか、よりエンドユーザーが設定可能なモジュラーアプローチを選択できます。いずれの場合も、最新のラップトップまたはPCのコストで、最大100メートルの水深で有意義なミッションを遂行するために完全に装備できます。 「コードを切る」ことを希望する人には、追加のオプションがあります。
近年、効果的なAUVはより小さく、より手頃な価格になりました。 ROVのいとこと同様に、考慮すべき複数の例があります。最新の「マイクロ」AUVは、おそらく以前のRiptide Autonomous SolutionsであるBAE Systemsの製品に最もよく関連付けられています。 Riptideは小型車と急速な成長の物語です。 2015年に設立されたRiptideは、コンパクトなAUV製品を迅速に提供しました。
Riptideの最初の製品は、マイクロUUVでした。これは、自律性と動作、海中センサー、およびその他の新しいペイロードの開発者に適した、最先端の低コストソリューションを提供する、柔軟性の高いオープンソースの自律型海中車両です。マイクロUUVは、オープンなハードウェアとソフトウェアのインターフェースを備えており、ユーザーに信頼性が高く堅牢なプラットフォームを提供して、技術開発を進めています。車両設計は、クラス最高の流体力学特性を備えた高効率のために最適化されました。ベースのマイクロUUVは、直径4 7/8インチ、長さ40インチ、重量は22ポンドです。標準システムの深さは300メートルです。
この車両は、「典型的な」業界提供のように見えるかもしれませんが、その小型サイズ以上のものによって差別化されています。ソフトウェア設計では、エンドユーザーのニーズに焦点が当てられていました。典型的な独自のアーキテクチャとは対照的に、マイクロUUVは、大量のオープンソースソフトウェアを活用する柔軟なアーキテクチャを備えていました。 micro-UUVソフトウェアの最初のリリースでは、RiptideはArduinoおよびBeaglebone Black開発プラットフォーム用のコードを提供し、MOOS-IvPロボット制御エンジンをサポートしました。これは、AUV向けの強力な機能セットでした。 15,000ドル前後の開始価格で、大きな市場の関心がありました。
2019年までに、この製品の成功はBAE Systemsによって注目されました。 BAE Systems FAST Labs組織はRiptideを買収し、現在プラットフォームテクノロジーを成熟させ、製造を拡大しています。 FAST LabsはBAE Systems、Inc.のR&D部門であり、
防衛産業は、顧客が資金を提供するR&Dビジネスとして、
会社のグローバル企業全体で協力して、高度な技術を開発および移行します。 Riptideが最初に発売したマイクロAUVは、このプロセスの恩恵を受けています。
最近登場したもう1つの小さなAUVはRangerBotです。この車両は、エンドユーザーに手頃な価格のソリューションを提供するために、異なるアプローチを取ります。 RangerBotは、オーストラリアのブリスベンにあるクイーンズランド工科大学(QUT)のエンジニアによって設計されました。 QUTのチームは、マシンビジョンに焦点を当てたロボットセンターで働いています。また、グレートバリアリーフの環境評価の支援にも取り組んでいます。重要なパラダイムシフトが可能になったのは、チームがターゲット環境の水条件が非常に明確であることを認識し、視覚ベースのセンシングのみを採用することを選択したときです。
 サンゴ礁上のレンジャーボット(Credit Matthew Dunbabin / QUT)これはおそらく聞こえるかもしれませんが、アコースティック楽器のサイズ、パワー、そして最も顕著なコストペナルティを放棄すると、レンジャーボットは典型的な代替品よりも小さく、使いやすく、手頃な価格になりました。一連のカメラを使用して、RangerBotは、深さだけでなく、底の水平方向のコースも管理できます。最新の写真モザイクツールを使用して、車両は調査サイトで有用なデータ製品を作成することもできます。視覚システムは、複雑な環境管理アプリケーションも可能にします。RangerBotとその前のプロトタイプは、サンゴ礁を破壊する捕食者であるオニヒトデ(COTS)を特定できることを証明しました。 AUVは、侵入生物にのみ害を与える溶液を正確に注入することにより、COTSを排除できるペイロードを運ぶ能力も実証しています。このミッションをサポートするペイロードインターフェイスは、リーフの復元にも役立ちます。最大8リットルのサンゴの幼虫の膀胱をRangerBotに取り付けることができます。自動ビジョン機能を使用して、AUVは劣化したサンゴ礁の適切な裸の空間を識別し、適切な濃度の幼虫を堆積させることができます。したがって、完全にロードされたRangerBotは、約250平方メートルのサンゴ礁に種をまくことができます。これは、以前のダイバーベースの技術よりも効率的です。
サンゴ礁上のレンジャーボット(Credit Matthew Dunbabin / QUT)これはおそらく聞こえるかもしれませんが、アコースティック楽器のサイズ、パワー、そして最も顕著なコストペナルティを放棄すると、レンジャーボットは典型的な代替品よりも小さく、使いやすく、手頃な価格になりました。一連のカメラを使用して、RangerBotは、深さだけでなく、底の水平方向のコースも管理できます。最新の写真モザイクツールを使用して、車両は調査サイトで有用なデータ製品を作成することもできます。視覚システムは、複雑な環境管理アプリケーションも可能にします。RangerBotとその前のプロトタイプは、サンゴ礁を破壊する捕食者であるオニヒトデ(COTS)を特定できることを証明しました。 AUVは、侵入生物にのみ害を与える溶液を正確に注入することにより、COTSを排除できるペイロードを運ぶ能力も実証しています。このミッションをサポートするペイロードインターフェイスは、リーフの復元にも役立ちます。最大8リットルのサンゴの幼虫の膀胱をRangerBotに取り付けることができます。自動ビジョン機能を使用して、AUVは劣化したサンゴ礁の適切な裸の空間を識別し、適切な濃度の幼虫を堆積させることができます。したがって、完全にロードされたRangerBotは、約250平方メートルのサンゴ礁に種をまくことができます。これは、以前のダイバーベースの技術よりも効率的です。
これらの成功した研究努力に触発されて、QUTのチームは、生産のためにRangerBotの設計を最適化し、商業化の努力をサポートする準備をしています。この製品バリエーションが市場に投入されると、AUVフリースイミング効率とROVレベルの操縦性、および高度な調査と検査機能を組み合わせた強力なソリューションが提供されます。ここでの注意点は、視覚技術が機能するには、水の透明度が十分に高くなければならないということです。しかし、世界の海洋にはそのような運用環境が数多くあります。
ここで紹介する例は、「優れた海中車両は小さなパッケージで提供される」という声明を検証するために提供されています。 ROVおよびAUVのユーザーは、ここで説明したシステム以外にも多くの選択肢を見つけることができます。これらの開発の根底にある傾向には、オープンソースソフトウェアの普及、最新の生産ツール、および他の分野、特に家電製品からのコストメリットが含まれます。革新的な思考とクリーンシートデザインの影響も注目に値します。ここで紹介されている車両や、この分野のその他の多くのコンパクトな製品は、この分野にとって新しい個人または組織の考え方から恩恵を受けています。古い技術や設計コンセプトを打ち破ることは、小さな海底車両コミュニティを可能にする大きなアイデアのようです。
-170484 "(写真提供:ヴァン・オード)")

が、2026年4月9日にケープコッド湾で子クジラと一緒にいるところを撮影された。写真提供:ニューイングランド水族館、NOAA許可番号25739-01に基づき撮影。")


「トリトン」は、昨年ガルフポート港に採用された。写真提供:オーシャン・エアロ")





