SmallSat AUVネットワーク


写真:シュミット海洋研究所

写真:シュミット海洋研究所

深みを加える:オーシャンビューの全範囲。イラスト提供:Kanna Rajan教授

深みを加える:オーシャンビューの全範囲。イラスト提供:Kanna Rajan教授

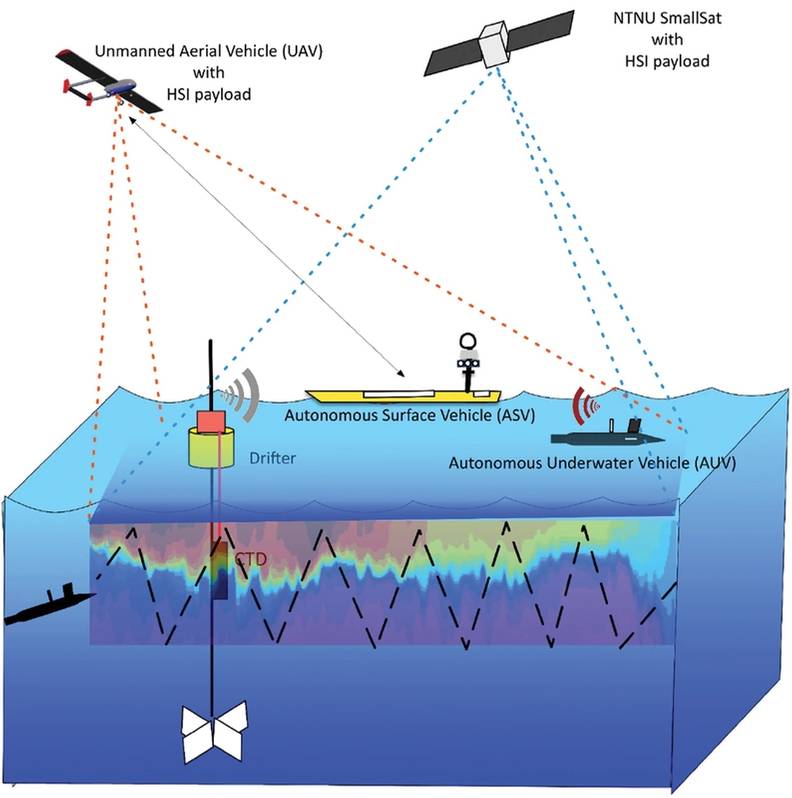
AUVの世界を変える:NTNUのSmallSatのビジョンには、海洋浮上のハイパースペクトルセンシング、地上制御のためのこれの視覚化、およびネットワーク接続されたAUVのルーティングが含まれます。イメージ:NTNU
地球規模のネットワークには衛星リンクよりも多くのものがありますが、それでも衛星リンクの遠隔操作の専門家は世界に大きな科学的および技術的利益をもたらすことができます。それが背景で起こっていることです - 世界中から最高の科学者の小さなネットワークは自律型水中乗り物、またはAUVsのネットワーク化された使用において画期的な成果をもたらす通信とロボット工学を調整しています。
私たちが行ったように、カンナラジャン教授に連絡するならば、彼はあなたが彼が世界で最も優れた「ドローン」研究者ではないとあなたに言うでしょう、それでも彼は少なくとも2つの火星ミッションを計画しました。 AUVの世界で可能なことを考えているのであれば、Rajan教授はAUVネットワーク制御の教祖、ポルト大学のJoãoTasso De Figueiredo Borges De Sousa教授がお勧めの人物であると示唆しています。 Dr. RajanはポルトガルのPortoと提携しており、ノルウェーの大学NTNUがAUVを制御するために計画している小型衛星(SmallSats)の使用について述べたビジョン声明の中で長さを(約50倍)引用しています。 NTNUのポスドク、博士号および修士課程の学生は、SmallSatの打ち上げ日に近づいています。その後、North Sea AUVは、陸上の科学者にデータを中継できるようになるための一歩を踏み出すでしょう。 SmallSatsとAUVはどちらも、化学物質、金属、プランクトンを検出したり、調査作業を行うことができるハイパースペクトルカメラを備えています。
カリフォルニアに本拠を置くRajan教授は、NASAのAmes Research Centerで自律システムとロボット工学を計画、実行、作成することで知られる上級科学者です。 De Sousa教授はNTNUのようなAUVに熱心な科学者の国際的なネットワークを率いています。どちらも高度に進化したAUVラボを持っています。 3つの研究コミュニティが協力して、マイクロまたはナノ衛星によって制御または拡張されたAUV運用を実現しました。10〜100キログラムまたは1〜10 kgのSmallSatsです。 De Sousa教授の専門であるネットワーク化されたAUVS(およびその他の無人偵察機)の一括管理および制御とは別に、SmallSatsが海洋理解および海洋運用のためにインターネットがマーケティングおよび即時知識のためにしたことをすることが望まれます。
AUV制御
「私たちの仕事の大部分は共同であり、戦略的に私たち全員(NTNU、Porto、NASA)は同じ方向に進んでいます」とRajan博士は言います、「これは制度と集団の両方です」とRajanは火星探査機からの切り替えを認めますAUVを海上で「操縦する」ことは予想以上に困難でした。 「インフラストラクチャには、2004年にローバーを、1999年にディープスペース1宇宙船を指揮することに関連するタスクが含まれていました。しかし、天候の良い船で沿岸地帯に到着するのは残念です。ローバーもAUVも、それ自体が人間の感覚を拡張したものですが、海に着いて物事をうまく機能させるためには、さらに多くの作業が必要です。」
だからこそ、Rajan教授、De Sousa教授(私達は連絡が取れませんでした)と彼らのNTNUの同僚達は、SmallSatsの立ち上げをとても楽しみにしています。その焦点は海洋研究に革命を起こすでしょう。このヘビー級科学ネットワークのネットワークでは、AUVの限界が明らかにされており、ハワイから香港までの研究者たちは、宇宙探査機や彼らの「Deep Space Networkのインフラストラクチャ」よりもAUVと通信するのは難しいと証明するでしょう。 「力は重要な欠点です」とはいえ、この3人組の研究者を夜中に目覚めさせるのは、通信の問題です。
 AUVネットワーク担当者:Schmidt Ocean InstituteのFalkor船に乗っているJoao Tasso de Sousa教授。写真:シュミット海洋研究所
AUVネットワーク担当者:Schmidt Ocean InstituteのFalkor船に乗っているJoao Tasso de Sousa教授。写真:シュミット海洋研究所
ポルトガルの探検家
RajanはTasso教授について正しい:「AUVと海洋ロボット工学における超大国は我々の親友であり共同研究者であるJoao Tasso(De Sousa)である。」
事実、ポルトガルはAUV開発と研究の大国です。隔年で開催されるIEEE OES自律型水中自動車シンポジウムの開催以外にも、タッソの水中システム&技術研究所(LSTS)とINESCTECの研究者の両方が自慢です。 De Sousa教授は最近、複数の面および水中ロボットを使用して海洋塩分の前線を調査する彼らのFalkor研究船に乗ってシュミット海洋研究所の探検隊を率いた。彼はまた、AUVを組み合わせた運用についてNATOの海軍を講演することも知られています。
De Sousaは、複数の自律走行車両を同時に管理するパイオニアであり続けています。彼は、ネットワーク接続されたAUVを簡単に制御するためのモバイル機器を組み込んだ商用および研究用ソフトウェアの開発を支援してきました。アプリケーションには、ある日、大量海洋監視、大量検査、大量調査、または大規模攻撃が含まれる可能性がありますが、海洋調査では、AUV(および空中無人機)が船舶ベースの海洋コントローラーを介して互いに接触していました。 SmallSatsは研究者自身の専用の帯域幅(これらは今のところNTNUであると理解されています)をこれらの探検に提供することができます。
ネットワーキングAUVには、PortoのLSTS of Uによって開発されたようなオープンソースの制御ソフトウェアが必要です。衛星を介して通信する複数のAUVは、内蔵のスニッフィングペイロードを使用して、広大な海域で発生する劇的な変化の正確な画像をリアルタイムで中継できます。または、SmallSatsが感知または観察するものを感知、サンプリングまたは撮影することによって確認できます。 。 Schmidt InstituteはDe Sousa教授チームに、「これまでは船や航空機の研究だけでは不可能だった時空間スケールで、海洋のさまざまな物理的、化学的、生物学的特徴を見つけ、追跡し、サンプリングする自律走行車」を配置しました。独自の分光カメラがあれば、SmallSatsはリアルタイムデータの別のレイヤーを追加します。
Schmidtの旅の間、RajanのDe Sousa教授との共通の関心領域である「機内AI」は、AUV、無人航空機および自律型水上艦艇が「複雑なサンプリング作業」を行うのを調整するために使用されました。 「時々」複数の車両が「共同作業」で働き、RipplesとNeptusと呼ばれるソフトウェアによって監視および制御されていると言われていました。長期間にわたってこれを実行するには、予想される海洋データの急流のための専用の帯域幅が必要です。それを実現するために、あなたのAUVは宇宙で彼ら自身のSmallSatsを必要とします。
 深みを加える:オーシャンビューの全範囲。イラスト提供:Kanna Rajan教授
深みを加える:オーシャンビューの全範囲。イラスト提供:Kanna Rajan教授
NASA品質監督者
ノルウェー人を入力してください。地震探査の結果のように、膨大な量のデータを保存して処理することを経験するのは難しいかもしれませんが、AUVおよびAUVベースの研究へのノルウェーの貢献の一部です。
それに加えて、成長しているSmallSat教員、2つのAIS衛星、および軍関係とのいくつかを含む一握りの「宇宙」服装。 Porto、NASA、NTNUの3つの「学校」の研究者全員が大規模で国際的ですが、SmallSatsのトライアドのスペースサイドの後押しを提供するのはノルウェー人とその招聘才能です。衛星打ち上げの経験を持つNTNUの学生もいます、そしてそれから彼の複合宇宙とロボット工学の経験を持つRajan教授の監督があります。 Rajanは、NTNUの従業員、NASAの従業員、およびポルトのUの仲間としてリストされています。彼はNASAの1999年新ミレニアムディープスペースワンリモートエージェントエクスペリメント(RAX)を実行し、ツインローバー用の2003年火星探査ローバーMAPGENコントローラーの主任研究員でした。 、NTNUのテキストによると。彼はまた、モントレー水族館研究所の自律研究の主任研究員でもあり、そこでAUV上のAIベースの組込みT-REX自律コントローラ、および海岸ベースのサポートシステムを設計、構築、展開しました。
費用対効果の高い通信
NTNUのノルウェーのAUVラボは、SmallSatの海上での打ち上げの大きな成果を記録する準備ができていますが、ノルウェーの資金は誇張されることはできません。この資金はEUの資金を上回り、ノルウェーでのAUVと海洋学研究にとって、Schmidt Instituteがポルトの海洋前面研究と他の海洋学研究者の研究のためにしたことと同じです。
「資金調達は、海洋ロボット工学や海洋科学を行う上で深刻な問題です」とRajan教授は書いています。米国には、海について何かをする必要があると信じる複数の機関や関係者がいます。これには、NSF、NOAA、DARPA、ONRが含まれ、それらはすべて交差し競合する利益を持っています。ノルウェーでは、これはそうではありませんが、(Research Council Norway)は資金調達プロセスを合理化するのに良い仕事をしました。アメリカでは違います。これとは対照的に、宇宙へ行くのです。ただ一つの入口があります。そしてそれがNASAです。それで、宇宙船を送るプロセスは、海に行くより、はるかによく理解されていて、より明確でより合理的です(米国国立アカデミーを通して)。」
Rajan教授によると、宇宙機関でも、複製と堅牢性に「膨大な金額」を費やしながら、自分たちの車から地獄を作り出す傾向があります。それはノルウェーのSmallSatsのアプローチではありません。 SmallSatsのホワイトペーパーでは、NTNUは、より堅牢だが高価な商用衛星で定期的な帯域幅を要求するのではなく、カメラとコムを備えた小型の専用衛星に焦点を合わせる必要があることを認めています。しかし、研究に没頭しても、NTNUは州の財政が常に来るわけではないことを知っています。そこで、彼らはSmallSatプログラムに焦点を当てており、そのコストは10万ドルから700万ドルの間になるでしょう。
この巨人のネットワークにとってさえ、現金は王です。しかし、AUVは海洋研究を手ごろなものにします。 Schmidt Ocean Instituteのミッションブリーフの中で、Joao Borges de Sousa教授は次のように書いています。彼はすでに「SmallSats」を考えていたかもしれず、NASAのRajan教授はNTNUのAMOS(自治海洋運用システムセンター)とPorto'sの両方に所属しています。水中システム技術研究所
この春から2020年までの間に、ノルウェーのランチャーがSmallSatを送り、その後、その用途はそれに連動して拡大すると予想されます。
AUVの増殖ノルウェーの宇宙センターはすでに、ノルウェーでの衛星打ち上げを監督しています。これには、ノルウェーの学生が自分たちのマイクロ衛星を設計しているものも含まれています(1kg未満)。 NTNUは、市販の部品を使用して製造したハイパースペクトルカメラと3Dプリントした部品から始めて、SmallSatsのリーダーになることを掲げています。
ノルウェーの亜北極圏にある島の宇宙センターであるNTNUは別として、SmallSatの打ち上げプログラムを拡大する準備をしています。防衛服、Norske Nammoは、SmallSatsを事前に定義された軌道に運ぶための環境に優しいマイクロロケットを準備していると伝えられています。
 空中および水中:Schmidt Ocean Instituteによる海洋フロントの調査中に、さまざまなAUVおよび空中ドローンがネットワーク化されました。写真:シュミット海洋研究所
空中および水中:Schmidt Ocean Instituteによる海洋フロントの調査中に、さまざまなAUVおよび空中ドローンがネットワーク化されました。写真:シュミット海洋研究所




")



-171000 "Inkfish向けVARD 9 42設計のRV11000(写真提供:Vard)")
-170484 "(写真提供:ヴァン・オード)")

が、2026年4月9日にケープコッド湾で子クジラと一緒にいるところを撮影された。写真提供:ニューイングランド水族館、NOAA許可番号25739-01に基づき撮影。")