ロボティクス:海中車両の次世代


発明のMUM(と娘):海の妖精とMUMは、新世代の水中システムと乗り物を刺激しています。エレインマスリンが見ています。
水中領域に入るための志願者のリストは急速に成長しています。概念は、長距離にわたって一連のペイロードを運ぶことができる水中自律マザーシップから、事前にプログラムされた場所への道を見つけることができる群がって展開された海底ノードまでさまざまです。
エネルギーに関連して、オスロに本拠を置くSubsea Valleyクラスターと年次会議が今呼ばれているように、2つのノルウェーのテクノロジー会社と海軍の潜水艦システムを設計するためによりよく使われる会社のThyssenkruppからのものを含む。
uSEAがuLARSを発表
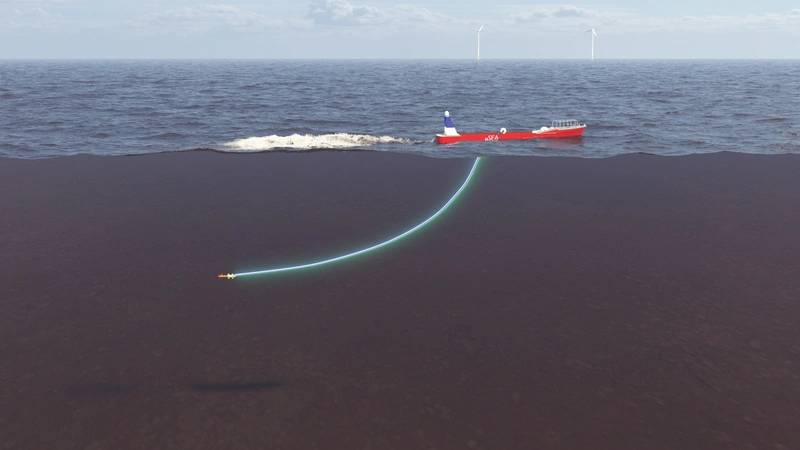
1つは、ノルウェーの技術スタートアップuSEAで、海底と地上ドローンの組み合わせによって既存の有人船舶支援海底運用を混乱させるハイブリッドシステムを提案しています。
uSEAは2017年に設立され、それ以来、無人ドローン、すなわち無人潜水艦(AUV)を支援するための無人潜水艦(USV)を開発してきました。打ち上げや復旧作業を避け、水中で行われます。これは、充電のためにAUVまたは遠隔操作車両(ROV)の完全な回復に頼る傾向がある他の地上無人機の概念とは異なるものにする。 uSEAのシステムは水中無人偵察機のためのuLARS(打ち上げと回復システムを意味する)と呼ばれ、Subsea 7、Aker SolutionsおよびXodus Groupで働く前にブラジル海軍に勤務したuSEAのCEO、Felipe Limaは言います。
それは自然な進行です。今日のAUVはますます機能的で信頼できるものになっています、とLimaは言います。 「彼らは、ROVの裏庭となっていたスペースを利用しています。しかし、それらには限界があります。 ROVのようにケーブルで接続されていないので、彼らはバッテリーに頼ります、そして、彼らはまだ母船を必要とします、例えば。彼らのバッテリーは12-48時間で使い果たされるので、調査船。 AUV用の移動式ドッキングステーションでは、海底のドッキングステーションに頼る必要はなく、より大型の水上艦船も必要ありません。」
 uSEAのuLARS水中ドッキングインターフェース(画像:uSEA)
uSEAのuLARS水中ドッキングインターフェース(画像:uSEA)
このシステムは、充電とデータ転送用の誘導コネクタを備えた水中牽引ヘッドを備えています。誘導コネクタは、戦闘機の空中給油のように動作します。アバディーン大学で海底工学の修士号を、オスロ大学でイノベーションと起業の修士号を取得しています。安全に、デッキでAUVを回復するためのムーンプールベースのハンドリングシステムもあります。
このシステムは、浅海域でも深海域や超深海域でも海底探査をサポートし、サイドスキャンソナーやマルチビームエコーサウンダーなどのより一般的なタイプから合成開口ソナーなどのより高度なものまで多岐にわたるペイロードを運用します。
uSEAは、来年(2020)年末までに期待される認定プログラムを完了するためのパートナーを探しています。その後、同社は海上での事業をターゲットにしており、2021年に実施するパイロットプロジェクトを探しています。
海の中のiDROP
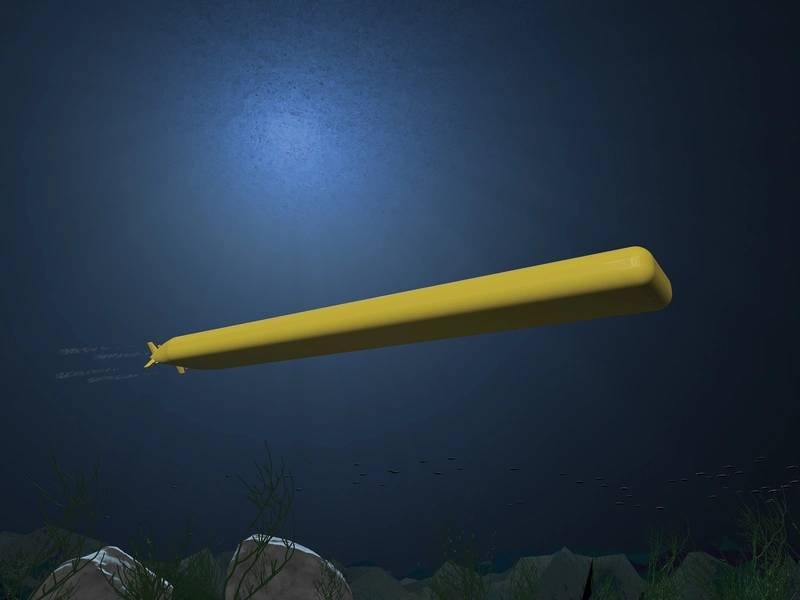
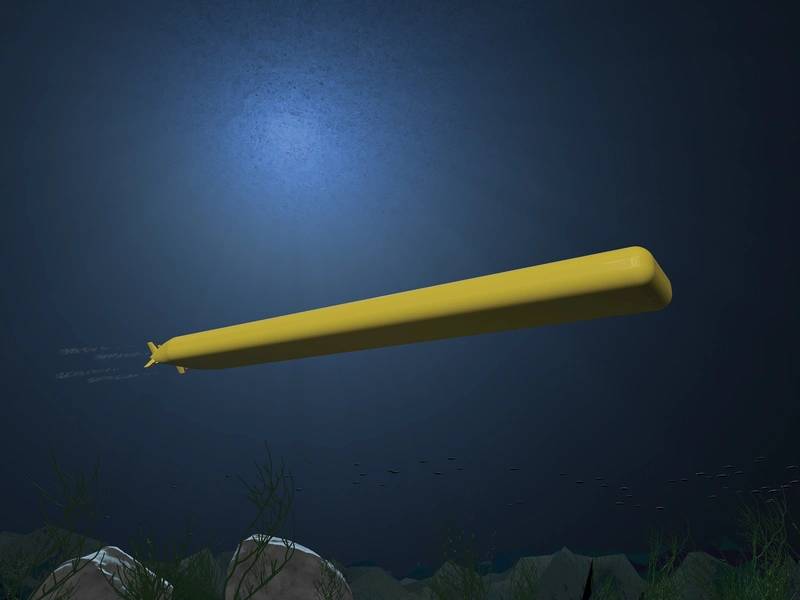
もう一つのノルウェーの技術会社、iDROPは、自律型Oceanidノードで海底地震技術市場を混乱させることを計画しています。 iDROPのシステムは、推進力と位置制御のために重力とバラストシフトを使用してアルミ製の脚に着地する海底の特定の事前に計画された位置に着地するドロップドロップ式の個別の円筒型センサーノード(ギリシャの海のニンフにちなんで名付けられます)着陸する前に飛び出します。
 iDROPのオセアニア。ギリシャ神話では、オセアノイドはタイタンズオセアノスとテティスの3000人の娘だったニンフです。 (画像:iDROP)
iDROPのオセアニア。ギリシャ神話では、オセアノイドはタイタンズオセアノスとテティスの3000人の娘だったニンフです。 (画像:iDROP)
アイデアはそれらがグループで展開されることができて、地震調査のために海底に格子パターンを形成するために落ちるということです。搭載された電池は降下制御(電池のわずか5%を使用)、データ収集(180日間)を駆動し、30kgのバラスト(塩スラリー製)を解放するメカニズムを起動させ、ユニットを地表に滑走させることができます。繰り返しになりますが、管理下にあるため、期待される目標を目指します。 iDropの創設者兼CEOであるKyrre JTjømは次のように述べています。馬と海底ジオソリューション。 「ROVによって海底に配置されているノードもあります。あなたがコンクリートバラストといくつかの推進された代替品で側面にそれらを捨てるところが他にあります。私たちのシステムは、重い荷役機械と時間のかかるROV操作を備えた大型の専門船の必要性を取り除きます。
Oceanidのグループは迅速に配備することができ、センサーポイントの粒度(すなわち、エリアカバレッジ、したがってどのくらいの量のデータを取得できるか)を増やすことができると彼は言います。これは、各ノードが事前設定された位置に「下降」して、垂直方向の自律横方向変位機能が69度になったことによるものです。 「1200mの水深にセンサーを配置したい場合は、水上船から2km離れた場所に設置し、線ではなくセンサーのパッチを設置することができます」と彼は言います。
それぞれ誘導型モデム、トランスポンダ、および地震センサペイロードを備えた9つのノードのバッチを15分で展開でき、確立された方法と比較して10倍の時間節約になります、とTjømは言います。拡張されたモデリングとテストに基づいたデジタルツインは、環境への影響を特定するのに役立ちます。波、海流、深さなどを考慮して降下を制御することができます。
「海底ノードを海底に設置する方法に革命を起こしています」とTjøm氏は言います。 「競合他社は1日あたり40〜170を処理しており、2台のROV、DP制御のノードハンドリングシステム、大型船、および特殊なクルーを必要としています。深くなればなるほど、臍帯を引っ張るためにより多くの推力が必要になるので、ROVは遅くなります。私たちは標準的な海の乗組員で一日あたりたったの1000以下にするでしょう。」
舞台裏でOceanidsプロジェクトには多くの作業が費やされてきましたが、テクノロジーが促進されているのは今だけです。実際、このプロジェクトは2010年に開始され、2013/14年にプロトタイプが構築されました。また、iDROPは復旧システムを構築し、復旧システムを検証するために沿岸テストを実施しました。今年の北海では、深海で3D地震データを取得する2回目のパイロットテストが計画されています。 9台の車両が製造され、上半期にテストのために洋上に出荷される予定で、来年にはさらに製造が予定されていました。
MUMの言葉
Thyssenkrupp Marine Systems(MS)は、ドイツの工業コングロマリットの一部であり、uSEAとuLARSの両方に対して異なる規模で取り組んでいます。同社は、基本モジュールとミッションモジュールで構成されるモジュール設計に基づいて、修正可能な水中マザーシップ(MUM)と呼ばれる非常に大型(最大50mまでの長さ)の無人潜水機(UUV)を設計しています。
その背景にある考え方は、今日の海中潜水艇の市場は特殊な製品に支配されており、複数の作業に1台の車を使用することはできないということです。そこで、Thyssenkruppはモジュラーシステムの設計に着手しました、とThyssenkrupp MSのプロジェクトを監督するWillem Hendrik Wehnerは言います。
 ティッセンクルップのMUMコンセプト(画像:ティッセンクルップ)
ティッセンクルップのMUMコンセプト(画像:ティッセンクルップ)
基本的なモジュールはトリムとダイビングシステム、バッテリー、推進力と水素燃料電池でしょう。その結果、ミッション重視のモジュールは、海底地震探査ノード(OBN)の配備(> 1000 OBN)から海底制御モジュールの変更から大型UUVを母船として使用する遠隔操作車両のホスティングに至るまで多岐にわたります。 MUMモジュラーキットは、標準的な20フィートまたは10フィート容器のサイズを有するモジュールからなるであろう。これらはミッション仕様に従って組み合わせることができ、80メートルトンから300メートルトン以上、または20メートル、4メートルから3メートルの高さから約50メートル、7メートル、3メートルの範囲でまったく異なる車両を生み出すことができます。ペイロードと推進速度に応じて消費電力が異なります。
「他の水中ビークルにはモジュール式のアプローチがありますが、主にペイロードセクションの適応、またはエネルギー容量の追加による耐久性の向上に関して」とWehner氏は述べています。 「良い例は、ATLASのSeaCat AUVです。これは、車両のヘッドを交換することでペイロードを変更でき、バッテリー容量を増やすことで航続距離を延ばすことができます。」
Wehner氏によると、MUM車は80-160kWの水素燃料電池で、水深数千メートルまでで、車の構成によっては数百マイルも走行できるという。 「水中範囲はスケーラブルであり、数百海里の範囲にあります。現在のユースケースには完全に十分です」と彼は言います。 「燃料電池用の当社のガス貯蔵システムは、体積当たりのエネルギーに関してはバッテリーよりも約3倍優れており、さらに重量に関してもさらに優れています。ただし、1000海里を超える距離をカバーする場合は、より一般的なディーゼル電気方式などの近距離輸送をお勧めします。そのコンセプトはこれを可能にします。」
水素燃料電池はThyssenkrupp潜水艦のための証明された空気に依存しない技術です。同社は、ドイツのHDW Class 212A潜水艦および他の潜水艦の水素燃料電池に関する豊富な経験を持っています。一部のペイロードのピーク負荷には電池が必要になるかもしれませんが、現在のほとんどのMUMの車両設計は小型のバックアップ/非常用電池しか持っていません、とThyssenkruppは言います。燃料電池システムは水中作業に耐えるための強みを持っているので、表面または表面近くの輸送用のモジュールが現在設計されています。
Thyssenkrupp MSは、長距離通信のために、長期間の任務において、双方向データ伝送機能を備えた自走式モデム、つまり自律型通信ノードを使用して、これらのノードのチェーンを通じて長距離音響通信を確立することを目指しています。 USBLモデムによるローカルナビゲーションまたは3Dポジショニング。これらはEvoLogicsによるNaviMUMと呼ばれるサブプロジェクトの下で開発されていて、MUMのリボルバーマガジンから展開されるでしょう。
EvoLogicsは、この概念を自己組織化モバイル水中ネットワークと呼び、ノードは中継局を形成し、測位を行います。彼らはミッションエリア内で自律的にファンアウトし、コミュニケーション環境を分析し、そして位置と相互接続を保持して柔軟な水中ネットワークを形成します。 Wehnerによると、GNSS受信機を持っている人もいます。
「特にMUMのような非常に大型の車両には、自律的な障害物回避とトラック再計画のために強力なセンサーとアルゴリズムが必要です」とThyssenkruppは言います。 「多種多様な可能性のある車両構成を反映する自己調整制御アルゴリズムは、車両のコンセプトをサポートするでしょう。このプロジェクトでは、移動と充電のためにネットワークを確立し、MUM車両にドッキングすることができる、自走式LBL / USBLモデムを備えたモバイル通信およびナビゲーションシステムを開発しています。」
Thyssenkrupp MSは、長さ5mのMUMの小規模バージョンを構築中で、今年の夏(2019年)のテストの準備が整います。多くの概念、特に自律ソフトウェアとモバイル通信は、このシステムでテストされます。新しい水素燃料電池や新しい圧力船体設計などのコア技術も、今年、実物大でテストされる予定です。
実規模のMUM車両は、2020年からテストされ、最大2023-24のテストと試作が行われる予定です。開発は、オペレータEquinor、地震会社PGS、および海中請負業者Boskalisを含む石油およびガス産業からの諮問委員会によって支援されています。
同社はまた、ATLAS ELEKTRONIK、ベルリン工科大学、ロストック大学の各プロジェクトで、制御システムとシステムシミュレーションに取り組んでいます。
とROVスバスティアン号は、今回の遠征で南大西洋に展開した。©-167708 "調査船ファルコール号(同じく)とROVスバスティアン号は、今回の遠征で南大西洋に展開した。© ミシャ・ヴァレーホ・プルット / シュミット海洋研究所")
-167451 "(クレジット:フィンカンティエリ)")









も、船首改修工事により、厳しい気象条件下においても高品質の地図データを取得する船体ソナーシステムの精度と信頼性が大幅に向上しました。写真:ミシャ・ヴァレーホ・プルット/シュミット海洋研究所")