水中車両用の電動モーターの選択: 部分負荷効率の考慮
永久磁石同期モーター (PMSM) が水中飛行体 (UV) での使用に人気がある理由は簡単に理解できます。これらはコンパクトで効率的であり、高い電力密度を備えています。さらに重要なことは、おそらく、幅広い RPM 範囲にわたって効果的な動作を可能にし、複数の動作条件を持つ車両にとって有益であるということです。そうは言っても、自動車製品開発者はモーターの「効率」についてよくわからないことがわかります。この記事では、UV のモーターに負荷をかけるコンポーネントを開発するプロペラ設計者の観点から、いくつかのコメントを提供します。
まず、「システム」の説明から始める必要があります。これは、車両 (推力要件を確立する)、プロパルサー (通常、必要な推力を生み出すオープンまたはダクト付きプロペラ)、およびドライブ (原動機) で構成されます。その唯一の仕事はプロパルサーを必要な RPM で回転させることです)。システムを概念的なユニットにまとめると、システムの利点は車両速度 (牽引用途の場合は推力) となり、システムのコストは「燃料消費量」となります。内燃機関によって駆動されるシステムの場合、コストは燃料油の消費量、たとえば 1 時間あたりのリットル単位です。通常、エンジン メーカーは、あらゆる用途での燃料使用量を確実に予測できるように、エンジンの RPM と出力範囲全体にわたる燃料消費量に関する十分な情報を提供します。この分布をプロットしたものは「燃料マップ」とよく呼ばれますが、出力から入力までのエネルギーの「効率マップ」と考えてもらいます。
残念ながら、PMSM ドライブを使用する場合はまったく異なる状況になります。モーターによって生成される利点とモーターで使用される燃料が「動力」という用語を共有しているため、混乱が生じる可能性があります。1 つは機械シャフトの出力 (推進器を駆動する) であり、もう 1 つはその入力電力 (電圧の関数) です。およびコントローラーによって供給される電流)。両者の比が「モーター効率」です。すべての RPM と負荷における正しいモーター効率を知ることは、システム設計と解析を成功させるために重要です。ほとんどの開発者テストでは電力が記録されますが、システムの全体的なパフォーマンスを理解するにはシャフト電力を知る必要があります。
メーカーが公表しているモーター曲線は、RPM 範囲全体にわたるトルク (したがって出力) の限界を示していますが、多くの場合、単一の設計点またはトルク限界での機械効率と電気効率のみを示しています。エンジン サプライヤーから入手できるものとは異なり、PMSM の RPM とシャフト出力負荷の両方の有効範囲にわたる、機械から電気への完全な「効率マップ」を持っていることはほとんどありません。このデータを取得するために、当社の顧客の中には小型動力計でモーターをテストして効率マップを生成する人もいます。ただし、これにはコストと時間がかかる可能性があり、モーターが選択されるかどうかさえ疑問がある初期段階の設計では、無駄な作業になる可能性があります。
PMSM の効率損失の原因は何ですか?説明には、巻線抵抗、機械的摩擦、さらには磁束の影響などの用語が複雑に組み合わされています。そこで、機械負荷シャフト出力 (PS)、効率 (EFF)、RPM、および電力損失 (LOSS) という広義の用語を使用して、一般化して少し単純化してみましょう。
• モータ効率は EFF = PS / (PS+LOSS) として定義されます。
• 話を単純化するために、損失には 2 つのタイプがあると言えます。1 つは電力負荷に依存するか、もう 1 つは RPM に依存するということです。
• 損失 (効率ではなく、損失) は、a) RPM、b) 電力の 2 乗に比例する傾向があります。
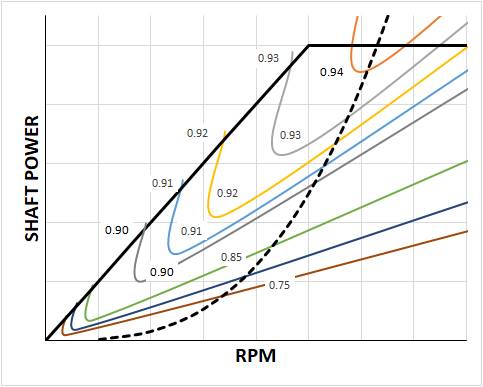
「定トルク、定出力」PMSM の一般的な代表的な効率マップを以下のプロットに示します。当社では、車両や推進装置のエネルギーの生成と伝達を伝えるには電力の方が優れていると考えているため、常に「トルクベース」のプロットを「パワーベース」のプロットに変換することを実践しています。黒の実線はモーターの限界曲線を表し、破線は一般的な推進器需要曲線、色付きの線は効率マップのサンプル図を表します。
このプロットから、部分負荷での動作がモーター効率にどのような影響を与えるかがわかります。モーターが定格出力の 80% 程度を生成している限り、RPM の上限範囲のほぼ半分がモーターの最大効率の数パーセント以内に収まるため、高効率を維持できる RPM の範囲は広範囲に渡ります。車両の動作に関しては、最高速度では効率が最大となり、95% に達します。 75% の速度では、電力需要は 40% ~ 45% になり、効率は 85% ~ 90% に低下します。 50% の速度では、ほとんど電力は必要とされず、モーター効率は 75% 未満に低下する可能性があります。
(これらは概念を表すためにここで使用されている一般的な数値であることに注意してください。実際の効率はモデルごとに異なります。)
それでは、いくつかの基本的な観察を残しておきます。
• PMSM の潜在的な最大効率はモーターのサイズによって異なります。モーターの出力が大きいほど、効率が高くなる可能性があります。たとえば、20 kW PMSM の最大モータ効率は全負荷時に 95% を超える可能性がありますが、1 kW 未満のモータでは通常 90% にしか達しません。
• 上で述べたように、効率は RPM によって異なりますが、全負荷またはほぼ全負荷を必要とするほとんどのアプリケーションで高効率を維持できる RPM の範囲はかなり広いはずです。
• モーターを低電力で動作させるとモーター効率が大幅に低下する可能性があるため、部分的な電力負荷はほとんどのアプリケーションにとって大きな問題となります。たとえば、分数シャフト出力ではモーター効率が 70% 未満に低下する可能性があります。
電気モーター、特に PMSM は、2020 年の NavCad 開発作業の重要な焦点です。私たちは、電力を「燃料」とし、一般的なモーター曲線形状 (「定数トルク、定出力」)を初期段階の設計に使用します。そしてもちろん、設計外の部分負荷効率マップの予測モデルにも深く取り組んでいます。
この記事は、Marine Technology Reporter 2020 年 3 月号でご覧いただけます: https://magazine.marinelink.com/nwm/MarineTechnology/202003/#page/20
Cellula RoboticsがVimy Forge Black Flight Cohortの最終候補に選出

トランスオーシャンとヴァラリスが提携、73基の掘削リグを有する170億ドル規模の海洋掘削大手を設立

-167897 "トランスオーシャンのバレンツ半潜水リグ(クレジット:トランスオーシャン)")
アルゼンチンの深海は科学者が考えていたよりも生物多様性に富んでいる
とROVスバスティアン号は、今回の遠征で南大西洋に展開した。©-167708 "調査船ファルコール号(同じく)とROVスバスティアン号は、今回の遠征で南大西洋に展開した。© ミシャ・ヴァレーホ・プルット / シュミット海洋研究所")
フィンカンティエリ、イタリア海軍の海洋調査船を進水
-167451 "(クレジット:フィンカンティエリ)")







