現代のUUV推進装置の設計


車両推進物理学の観点からは、無人潜水機(UUV)はあなたの個人的なスキーボートやタンカーとはほとんど違いはありません。これはVessel-Propulsor-Driveシステムモデルを共有しており、これによりPropulsorはVesselを移動させる目的でDriveエネルギーを推力に変換することができます。推力の平衡と運動の基本原理は、システムの中心要素である推進力である回転エネルギーの軸方向推力への変換と同様に、3つすべてに共通です。
異なる車両タイプで共有されていないのは、各車両の使命に固有の制約と設計目的です。例えば、スキーボートは牽引速度で高い推力を必要とするかもしれず、この任務要件を達成するために潜在的な最高速度をあきらめても構わないと思っている。その伝達比とプロペラ特性はこの目的のために設計されています。タンカーは、最大の経済的利益を得るために、「業務のスピード」で最大の効率を必要とします。あるいは、それはさらにエミッションまたは燃料削減のための制約を有するかもしれず、プロペラの設計における妥協を必要とする。
水中機体は、バッテリー寿命(またはバッテリーの予算のために移動した最大距離)、最大車体直径、最小動作速度、流体力学的効率または安全性に対するシュラウドまたはノズルの考慮などの様々な任務に関連する独自の推進装置設計要件を有する。プロペラの接触、またはデータ収集のための静かな操作を確実にするための騒音の減少。これは、HydroCompでのUUV推進設計作業の設定であり、設計プロジェクトを成功させるために本当に重要な情報を収集するためのクライアントインタビューから始まります。 Vessel-Propulsor-Driveモデルはそのような議論のための良いフレームワークです。
容器
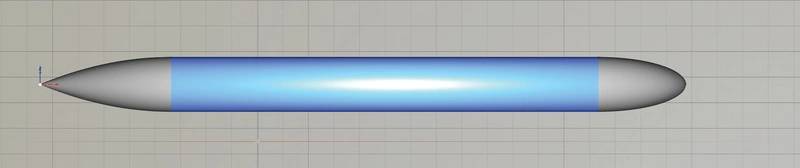
典型的なUUVはノーズ、ボディ、テールを持つ回転体型船体(軸対称型とも呼ばれます)です。機器の最大内部容積のために、いくつかの車両は非常に短い鼻と尾を持っています。ご想像のとおり、鈍い鼻にはある程度の抗力ペナルティがあり、軸方向ではなく急な勾配に沿った推進装置への流れに対する推進力のペナルティがあります。私たちの仕事の一部は、最小の抵抗対体積の結果を得るために、抵抗のさまざまな部分 - 波の生成または圧力の抗力と摩擦または粘性の抗力のバランスをとることです。実際には、それは完全に真実ではありません。私たちは本当に最小のパワー対ボリュームの結果を望んでいます、そして尾の幾何学は回転エネルギーから有用な軸方向の推力を開発する推進力の能力に大いに影響するでしょう。
そのため、多くの推進機設計プロジェクトは、流体力学および推進システムシミュレーション用のNavCad®ソフトウェアを使用して、車両の抗力および船体推進力係数(航跡率および推力推論)を予測することから始まります。特定の潜水艇のモジュールは、魚雷のようなUUVハルフォームのための強力な予測能力を提供します。
 画像:Hydrocomp ドライブ
画像:Hydrocomp ドライブ
Propulsorの反対側にはDriveがあり、これは通常電気モーターです。モーターの電気的特性はさまざまですが、推進装置の設計にとって重要なデータはシャフトの機械的出力 - 回転数曲線です。 「アップストリーム」入力電力はもちろん重要であり、運用上の制約をもたらします。入力電力をモーター効率曲線で評価します。これは、質問に答えるのに役立ちます。最大のバッテリー寿命が最優先の場合、最適な目標RPM範囲はどれくらいですか。他方、それは私達に可能な最大のシャフトの力のためのRPM、そして拡張によって、最大の潜在的な推進力推力と車速のためのRPMを私達に告げるのはシャフトの力 - RPM曲線です。
シャフト出力と電気効率対RPMの代表的なモーター曲線からわかるように、最高の潜在的な出力が(もしあったとしても)最高の電気入力効率で発生することはめったにありません。そのため、RPMの設計ポイントは、より高い出力も最高の電気効率も得られない妥協点として定義する必要があります。
モーター駆動のUUVについてのいかなる議論にも関連しているのは、シャフトRPMがほとんど常に最適な推進力動作には高すぎるということである。最高の推進力性能を達成するために何らかの形態の伝動装置を見ること、または推進力が中程度の効率で作動しているかもしれないことを受け入れることは珍しくありません。
推進力
「プロペラ」ではなく「推進機」という用語を使用していることに気付くでしょう。これは、ノズルとプロペラ(ほとんどのUUVに見られ、しばしば車両の「スラスタ」と呼ばれる)が対話型ユニットであるPropulsorであるという概念を強化するためです。推進装置の設計は、相互作用を追跡しながら、最適なプロペラとノズル(ダクトまたはシュラウドとも呼ばれる)を見つけることを組み合わせたものです。つまり、システムモデリング用のNavCadやプロペラノズルコンポーネント設計用のPropElements®など、この相互作用を含む設計ツールを使用する必要があります。
すべてのUUV推進装置設計プロジェクトにおいて、普遍的な目的の1つは、最も優れた推力対出力比(その効率)を生み出す形状を開発することです。 UUV推進装置の設計を成功させるのは、一般的に外部設計ドライバの影響によるものです。たとえば、RPMが高すぎる可能性があります(上記のとおり)。幾何学的拘束は、最大直径を制限することができ(ボディ直径内に確実に収まるようにするため)、または車両のテールの傾斜を考慮して設計に影響を与える可能性があります。
ちょっと時間をかけてUUV推進装置製造の意味を述べることは重要です。プロペラのアディティブマニュファクチャリング(AM)については、マスコミでかなりの議論があります。これは経済的および実現可能性の観点から魅力的かもしれませんが、不適切な表面の質感(ほとんどのUUVで見られる小さなサイズの推進力に大きな影響を与える可能性があります)、またはブレードの流体弾性撓み。 HydroCompは、さまざまな社内調査プロジェクトを通じて、小型推進機にAMを使用するための成功事例を開発しました。
これらの実用的な設計上の考慮事項を超えて、最も興味深い現代の設計ドライバの1つは放射ノイズのトピックを推進しています。より広範な持続可能性イニシアチブの一環として、HydroCompは推進力のあるハイドロ音響(騒音と振動を捕らえる用語)の予測と軽減における専門知識を開発しました。この知識は他の海軍建築家や技術者にも利用されています。新しい音響音響機能が私たちのツールのために開発されているからです。プロジェクトのノイズに対する感度は、常にUUV推進装置設計エンジニアのクライアントとの話し合いの一部になっています。
すべての水音響学的励起は質量変動(流体質量の周期的な動き)からのものです。プロペラ駆動の水音響学は一般に、プロペラが支柱や制御フィンの後ろなどの「陰影のある」領域の内外に回転するときのプロペラの低圧ゾーンの変動によって引き起こされます。変動の一部は、単に流入量の変化によって引き起こされるブレード周りの流れ方向の変化によるものであるが、より重要なのは、ブレード上のキャビテーションの急速な膨張および崩壊によるものである。これらのそれぞれは、必要に応じてブレードのアウトラインとキャンバーピッチの分布を変更することで緩和しながら、私たちの推進力のあるデザインの一部として評価されます。
過度の水音響励起 - そして伝達 - も創造的なノズルデザインで補助することができます。ノズル性能モデリングにおける我々の背景を使用して、特定の騒音を抑えるノズルの幾何学的形状が必要な抑制および推進力効率の損失をもたらすことができるかどうかを検討することができる。
そのため、UUV推進装置の設計には独自の課題が山積していますが、それでも大きなシステム問題の中では単なる構成要素の作業です。それは満足のいくエンジニアリング上の課題を提供することができ、それは少しの注意、適切な道具、そして実際の経験で首尾よく完成することができます。
著者について
 作者のDonald MacPherson。
作者のDonald MacPherson。
推進システムシミュレーションの大手スペシャリストであるDonald MacPhersonは、HydroCompのテクニカルディレクターであり、そこですべてのソフトウェア開発およびエンジニアリングサービスを監督しています。 Webb Instituteを卒業した彼は、SNAMEのフェローであり、その推進流体力学パネルのメンバーです。
「トリトン」は、昨年ガルフポート港に採用された。写真提供:オーシャン・エアロ")










")