


北東イングランドに本拠を置くModus Seabed Intervention Limitedは比較的小規模の企業ですが、その目標は野心的で焦点が絞られています。 Elaine Maslinが報告しています。
改造されたSaab Sabertooth AUVシステムに基づくハイブリッドAUV / ROV(HAUV)の開発に4年間費やしたModus Seabed Interventionは、今夏に発売される2番目の深水定格Sabertoothを購入しました。
最新の3,000m定格のSabertoothを買収したことで、同社はその実績をさらに強化し、強化された人工知能と自律機能を備えた車両を提供することが可能になります。
同社のビジョンは、HAUVがサービス船とは無関係に、風力発電所を含む海上の石油、ガス、再生可能エネルギーの現場で操業することです。これは、表面展開システムを介しても、車両が出入りすることができる海底ガレージ/ドッキングステーションを介してもよい。ドッキング施設からは、車載バッテリーを使用してAUV(テザーなし)として、または直接制御が必要な場合は光ファイバーテザーを介してROVのように動作することができます(非常に長い移動が可能)。またはフルパワーと制御臍帯によって。
専用の支援船から配備されるのではなく、ドッキングステーションは船舶クレーンから海底に配備されるように設計されています。その目的は、供給船、DSV、海洋再生可能エネルギーサービス船など、すでに特定の場所で従事している船を使用することです。 HAUVは、船舶の主要な活動と相乗的に独立して検査や調査を実行し、コストを削減することができます。 HAUVは作業範囲の完了時にドックに戻り、都合の良いときに回復するのを待ちます。 「例えば、プラットフォームの供給を実行するために船舶に関わった場合は、HAUVを途中で降ろして、所定の作業が完了した後に帰ってくることができます」とModusのNigel Wardは言います。 '最高商業責任者。 Modusの現在のHAUVのバッテリー容量に基づいて、約60kmをカバーする調査は速度と積載量に依存する調査時間で、一回の自律充電で実行することができます。
Modusの経歴は海中トレンチサービスにあります。同社が新技術への投資を検討していたとき、ROV市場は飽和していないにしても成熟していると感じたため、ModusはRemus AUVの多様化と買収を検討しました。働いている。その意図は、(ROVが使用されているのではなく、ROV支援船を拘束している)船がその主な任務を継続しながら、船から撤退してRemusを発進させ、その仕事をさせることであった。海上プロジェクトを容易にし、熟練スタッフを陸上に保ち、コストを削減し、安全性を高めます。
Remusは、Modusが関わっていた活動にとっては、まったく正しい手段ではありませんでした。サイドスキャンソナーが付属していましたが、水深測定を望んでいたため、多くのAUVシステムと同様に、車両のアップグレードやさまざまな用途のセンサーの交換は困難でした」とWard氏は言います。 「いずれにしても、市場の既存のAUVは実際には自律的ではありません。多くの場合、船舶はスコープ内で車両を追跡する必要があります。これは、自律機能の目的を達成できませんでした。」
 画像:モーダス海底介入
画像:モーダス海底介入
そこで、ModusはSaab SeaeyeのSabertoothを調べました。 「ROVとAUVの間の交差点です。私たちは両方の利点を望んでいました。柔軟なサーベイセンサーペイロードを迅速かつ簡単に取り付ける機能は、顧客の要求を満たすために重要です。私達はセンサーを雇い、それを統合し、そしてあなたが離れて行くことができます。
現時点で開発されている非常に多くの新しい調査技術があります、それで我々は将来の乗り物を証明するためにそれを使うことができることを確かめたかったです。
「ROVのようにホバリングし、AUVのスピードを持ち、真に自律的な操作を実行できるようにしたいと思ったので、超短基線測位システムでHAUVを追跡するために船を捧げる必要はありません。 。 Saab Sabertoothがこの基準を満たしていると私たちは感じました。
「この車両は、その基本パッケージで、QINsyによって管理されるセンサーデータのデータ取得、ナビゲーション、および処理に、IXBlue Phins 3 INSおよびRDIの主力製品であるDVLを使用しています。しかしペイロードは柔軟性があり、ロングベースライン(LBL)アレイ内でも必要に応じてUSBLシステムでも使用できます。SonardyneAvTrak 6では、トランスデューサ、トランシーバ、およびテレメトリリンクを1つにまとめて提供できます」とWard氏は言います。
2017年に同社はデモンストレーションと試験を行い、2018年にHAUVは商業運用の準備が整いました。2017年の試験プロジェクトの1つでは、HAUVはスウェーデンのSaab's Facility近くの湖岸から打ち上げられました。約15kmのルートでMBES、SSS、SBPのデータを収集する芝生スタイルの事前プログラム調査で、支援船からの外部支援はありません(車両のDGPS、INS、およびDVLのみ)。 「調査を行って繰り返したところ、ドリフトはほとんど見られませんでした」とWard氏は言います。この車両はまた、自律的にその海底ガレージにドッキングして、何度も試行に成功しました。 2018年初頭、Innovate UKが資金を提供したウィンドファーム居住者検査プロジェクトの一環として、この機能がさらに開発されました。この試験はBlythのORE Catapult施設で行われ、Blue Logic誘導コネクタを使用した間接的な電力結合とデータ転送も含まれていました。
この資金援助を受けたデモンストレータープロジェクトの最終段階では、今年後半の商業的コミットメントの合間に、英国の洋上風力発電所で常駐型ハイブリッドAUVのコンセプトを試す予定です。 HAUVとそのドッキングステーションは、BlythのORE施設でのデモンストレーションのように、任務のために降ろされるでしょう。この機会に、それは風力発電所のインフラのいずれともインターフェースしないでしょう。 「しかし、ドッキングステーションを風力発電所に接続し、電力や通信にアクセスするのは比較的簡単です」とWard氏は言います。
 画像:モーダス海底介入
画像:モーダス海底介入
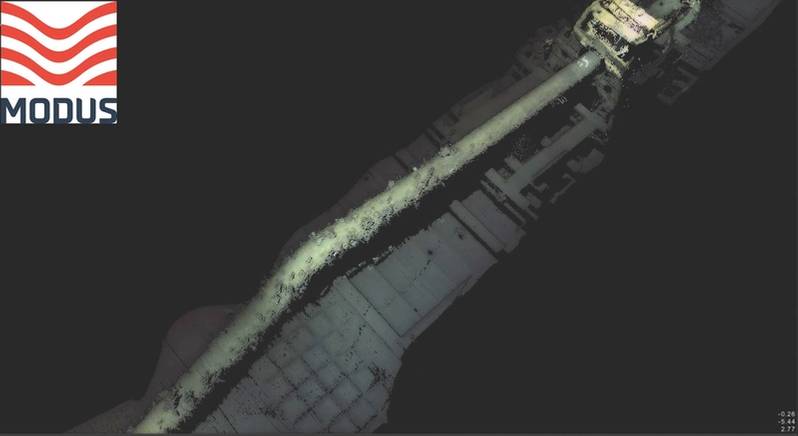
昨年、Modusは約240kmのパイプライン保全性調査を行うためにHAUV沖合北西オーストラリアを展開し、パイプラインと通過する海洋生物の両方についての素晴らしい画像と点群データを作成しました。 Cathx ScoutレーザープロファイリングとHDイメージングを使用した2knts)はマルチビームエコーサウンダー(MBES)と並んで広がりました。
調査時間は、調査を実施するために従来のROVを使用していた時間の半分であり、もっと早くなった可能性があります」とWard氏は言います。 「テザーがなくてもこのような調査は可能ですが、この場合はリアルタイムのデータを収集できるようにテザーで実施しました。」
ナビゲーションのために、この車両は、完成したままのパイプラインチャートからルート位置リストを追跡するためにUSBL支援を使用しました。これは、MBES用に収集されたパイププロファイルデータを使用してパイプルートを追跡する自律パイプ追跡アルゴリズムと組み合わせることができます。これは、位置誤差が原因で不正確さが原因で発生している可能性がある正確な位置が正確ではない場合に特に役立ちます。 「これらのシステムのため、AUVは事実上パイプラインを見ることができます。それはUSBL支援がパイプライン検査を実行するために必ずしも必要とされるわけではないことを意味します。 「CathXレーザーシステムは、パイプラインと隣接する海底の非常に高解像度の点群を提供します。レーザーとMBESの点群を後処理で組み合わせて、位置と考えられるフリースパンを評価するために使用しました。レーザーシステムから得られる非常に高い解像度は、それをスプール偏向および他の写真測量ベースの計測調査に適したものにします。
車両は安定していて静かで、パイプラインから一定の高さで飛行することができるため、HDカメラの画像とステッチされたレーザーベースの点群から生成された画像および測定値は非常に正確で処理が簡単です。
Modusがターゲットとしている市場の1つは洋上風力です。タービンアレイ分野はしばしば高電流領域にあるので、2017年に同社はスウェーデンの水力発電所でそのHAUVをテストに移しました。そこで、4.5ktのスピード対応車は3ktsの電流で位置と操縦を維持する能力を実証しました。洋上風力発電所では、しばしば保守作業のために現場にウォークトゥウォーサービス船が配備されているが、これらは事実上ホテルのボートで多くの冗長時間がある。検査活動を実施するためにROV船を動員する必要性を本質的に置き換えて、これらの船から配備され、回収されることができるようにHAUVを開発しました。それはサービス船をより価値のあるものにします。
Modusの場合は、外観検査だけではありません。同社はまた、GVI調査と並行して4kntsで非接触陰極防食調査を行うことができるForce TechnologyのFIGシステムを試験しています。
「Saabは堅牢な海中車両を設計しましたが、クラスをリードする調査および検査用車両として運用できるようにさらに開発しました」とWard氏は言います。 「私たちは、センサーの統合方法、センサー同士の通信方法、ミッションソフトウェアに焦点を当ててきました。現在、人工知能と機械学習機能に移行しています。 「パイプラインを見ればそれに従ってください、あるいはモノパイルが見ればその周囲を検査してください」とすでに言うことができます。これはすべて試験で実証されています。次の自律的な発展は非常にエキサイティングになるでしょう。近い将来、HAUVの追跡と調査を自律的に行いたいと考えています。様々なパイプ追跡技術が現在試行中です。目に見えるパイプラインの追跡に使用されているものと同様のアルゴリズムを使用できるため、これは迅速な開発になると期待されています。」
それは容易な旅ではありませんでした、しかし、ワードは、何人かが可能性を見ているのを見ます。 「このテクノロジを市場に投入する際に、私たちが課題に直面したことは間違いありません」と彼は言います。 「主に、多くの企業は、彼らが常に持っている方法で作業を続けたいと考えています。例えば、一部のオペレーターはまだパイプライン検査のためにROVカメラとブームカメラを指定しています。しかし、このHAUVを採用し、GVIに取り組むために少し異なるアプローチを必要とする顧客は、コスト削減とデータ品質の向上という利点を享受しています。
「HAUVは1年近く完全に商業的に運用されており、実績が増えています。そして、今後数ヶ月にわたって試運転を計画しているさらなる最適化と機能に非常に興奮しています。数ヶ月以内に」
-170484 "(写真提供:ヴァン・オード)")

が、2026年4月9日にケープコッド湾で子クジラと一緒にいるところを撮影された。写真提供:ニューイングランド水族館、NOAA許可番号25739-01に基づき撮影。")


「トリトン」は、昨年ガルフポート港に採用された。写真提供:オーシャン・エアロ")





